



 全部商品分類
全部商品分類













前言導讀
手術機器人是一種先進的醫療設備,借助微創傷手術及相關底層技術的發展而發明。手術機器人被用于在高于人類能力的微創傷手術領域中實現高于人類能力的對手術器械的精準操控。手術機器人通常由手術控制臺、配備機械臂的手術車及視像系統組成。外科醫生坐在手術控制臺,觀看由放置在患者體內腔鏡傳輸的手術區域三維影像,并操控機械臂的移動,以及該機械臂附帶的手術器械及腔鏡。機械臂模擬人類的手臂,為外科醫生提供一系列模擬人體手腕的動作,同時過濾人手本身的震顫。
機器人手術系統是集多項現代高科技手段于一體的綜合體,其用途廣泛,在臨床上外科上有大量的應用。外科醫生可以遠離手術臺操縱機器進行手術,完全不同于傳統的手術概念,在世界微創外科領域是當之無愧的革命性外科手術工具。
經過數十年發展,手術機器人現在主要用于五個快速增長的主要外科領域,其中的骨科、介入手術機器人是及其重要的一個版塊。
手術機器人市場概覽
當前,隨著人工智能、物聯網等新科技的快速滲透,醫療健康正在與機器人全面融合,引領外科技術大變革。手術機器人行業迎來快速發展,賽道火熱,備受資本青睞。根據Frost & Sullivan的統計,2020 年全球機器人手術市場規模為 61 億美元,預計從 2021 年到 2028 年將以 17.60% 的復合年增長率增長,到 2028 年將達到 222.7 億美元(折合人民幣約為1414億元)。我國手術機器人市場發展迅猛,根據Frost & Sullivan的統計,市場規模由2016年的人民幣853.6百萬元增至2020年的人民幣2,934.5百萬元,年復合增長率達36.2%,預計2030年中國手術機器人的市場規模將達至人民幣58,425.9百萬元,年復合增長率為34.9%。手術機器人是將機器人技術應用在醫療領域,顯然的,機器人手術是使用機器人系統完成的外科手術類型,機器人輔助手術的開發旨在克服現有的微創手術程序的局限性,并增強外科醫生進行開放手術的能力。手術機器人集成了醫學、材料學、自動控制學、數字圖像處理學、生物力學、機器人學等諸多學科為一體的新型交叉科學。一般情況下,從臨床醫學應用角度可將手術機器人主要分為腔鏡手術機器人、骨科手術機器人、泛血管手術機器人、 經自然腔道手術機器人、經皮穿刺手術機器人。下面兩幅附圖分別給出了各主要細分手術機器人的應用場景和市場規模情況,供各位讀者參考。


筆者認為,隨著時間發展,對于國內手術機器人市場而言,各大廠商會面臨如下5個方面的競爭,分別為:1.技術戰,入局者眾多,內卷嚴重,而且在技術上目前國外先進巨頭具有一定優勢,國內廠家只有通過技術上“高人一等”才能“脫穎而出”。2.臨床戰,目前手術機器人雖然種類繁多,但是依然是醫械法規強監管的產業,且市場受眾面以大城市的大醫院為主體,在如此眾多的品牌上市過程中,臨床資源就顯得彌足珍貴。3.融資戰,手術機器人是一個多學科高度集中的產品,研發周期長,臨床要求高,各方面人力資源也緊張稀缺,必然需要高額的投入,這些都需要大量的資本投入,因此手術機器人的玩法從資本市場來講其實就是“誰的資本強誰成功率大”。4.營銷戰,隨著國內、國外廠商的產品逐步上市,需要“賣出去”,也需要市場各群體的認同,更需要占據市場率,因此在眾多同類型同適應癥的手術機器人中“賣得好”才是各大廠商的終極目標,才是“長久之計”。5.專li戰,專li對于手術機器人而言十分重要,當然也是技術層面的演化,更是各大手術機器人廠商市場角力的重要武器,甚至是“終極核武”,規避設計風險、占據市場率都需要專li的輔助,達芬奇在腔鏡機器人領域“叱咤風云”恰恰是得益于專li。
術銳手術機器人概覽
術銳手術機器人,依托新一代可形變連續體手術機器人核心原創關鍵技術,由主控臺車和手術臺車組成;術者操控主控臺車上的主操作器,對手術臺車上裝載的可形變手術工具和3D高清電子內窺鏡進行遙操作控制,可完成多科室的單孔微創手術治療。整機通過了涉及數十個中外相關標準、數百個檢測項的嚴格檢驗,是首臺通過的創新醫療器械特別審查程序的單孔機器人,現已于泌尿外科、婦外科、普外科、胸外科等諸多科室開展臨床試驗。
術銳手術機器人僅通過一個皮膚切口上置入一多通道鞘管,遞送一支3D電子高清內窺鏡和3支手術工具,完成疾病極盡微創的手術治療。已完成亞洲首例的純單孔前列腺癌根治術和腎癌腎部分切除術,也完成了世界首例的腹膜外腎上腺腫瘤切除術。在目前的臨床試驗中,術銳腔鏡手術機器人表現優異,以單孔方式對多種病癥執行手術,對病人創傷進一步減小,手術流暢、動作精準,術后病人均恢復良好。

術銳手術工具和3D電子內窺鏡均采用了自主研發且擁有自主核心技術的“可形變對偶連續體機構”關鍵技術。手術工具負載良好、可靠性高、操控精準、運動靈活。3D高清電子內窺鏡采用八方向雙構節體內翻展的設計,視野調整范圍大、成像清晰細膩、色彩還原性優異。
主從范式是醫生操控主控制器,使手術工具末端執行器復現操作者的手部運動的一種控制模式。針對蛇形手術工具的形變運動特性,術銳自主研發了基于“串聯結構體—可形變連續體”異構遙操作核心算法和控制系統,實現了精準直觀、得心應手的操作體驗。在3D電子內窺鏡為術者提供的數倍放大的三維立體沉浸式視場中,手術環境一覽無余、操作可細致入微。術者還可為主從運動設置不同的行程映射比例,在必要時提高手術操作的精細程度。
術銳蛇形手術工具的臂體本身為可控形變結構,可由任意彎曲的入路通道進入人體且其運動和負載能力不受影響。此種特性使得術銳的手術和內窺鏡工具能掛載于四支定位臂上。四支定位臂的多種擺位和協同運動,使得術銳手術機器人不僅能支持多象限手術,還能兼顧單孔、多孔和混合孔多種術式,并為將來實現經自然腔道手術奠定了基礎。


術銳手術機器人手術工具采用高冗余的結構骨布置,任一結構骨斷裂均不影響其運動能力。系統設計基于雙環路獨立硬件實現全狀態安全監控、基于全流程風險預警實現全時段運動監控,集成多層次的安全監測機制和應急過程控制預案,確保手術實施各階段的安全。不僅如此,手術工具的可彎轉臂體在病患體內即可實現術中所需的運動能力,體外定位臂在手術操作過程中保持不動,完全避免了體外機械臂的術中碰撞風險,進一步提升了系統的術中安全。
術銳手術機器人技術方案簡析
在單孔微創手術中,一支內窺鏡和兩到三支手術工具須經同一皮膚切口進入病患體腔。內窺鏡須集成照明功能并實現術野的靈活調整,而手術工具須兼顧運動的范圍、精準性、靈巧度以及足夠的力度。相比于多孔微創手術,單孔腔鏡手術器械的排布更加擁擠、內窺鏡及手術工具的驅動傳動布置更加困難,還要保證臨床使用的功能性和可靠性,因此,單孔腔鏡手術機器人的研發面臨著重大的技術挑戰。
絕大多數單孔腔鏡手術機器人采用的設計范式是定位機械臂配合具備全維運動能力的手術工具。如下圖所示,定位機械臂在術中操作時靜止,其作用是把遞送內窺鏡和手術工具的多通道鞘管舉抬至所需位姿。內窺鏡和手術工具可展開為工作姿態進行手術。
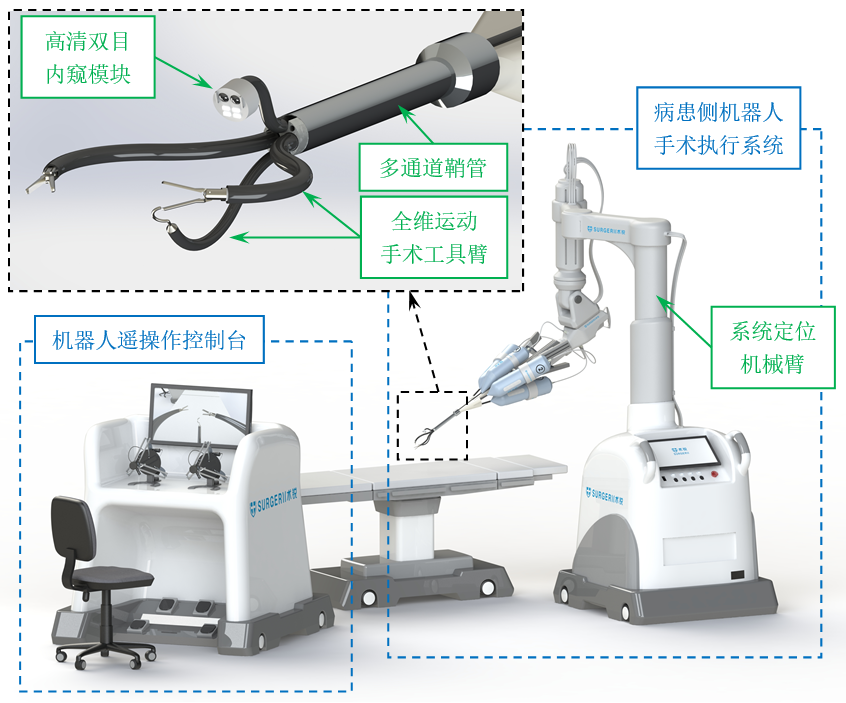
在這種范式下,內窺鏡和手術工具通過多通道單孔鞘套進入病患體腔,驅動手術工具實現大范圍、大負載、高可靠的運動成為最關鍵的技術。
為實現安全有效的單孔腔鏡機器人手術,學術界和產業界嘗試了各種技術途徑,包括鋼絲驅動、電機內置驅動、空間連桿驅動、遠心運動機構等。但這些技術途徑都有著其自身的缺陷,限制了其在臨床手術中的應用。
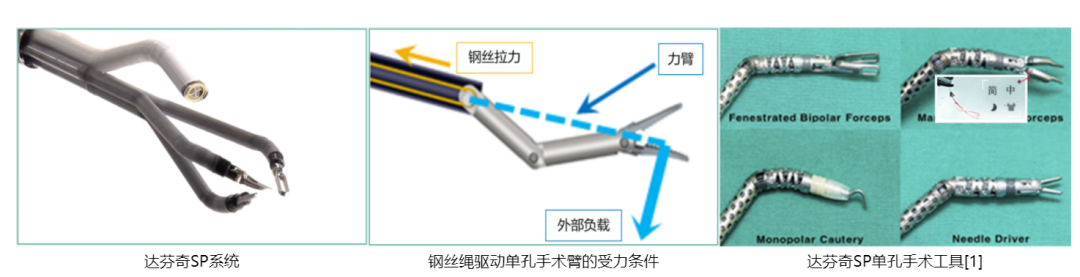
鋼絲繩是最常見的驅動方式。以達芬奇SP單孔手術工具為例,其肩部關節的鋼絲繩驅動采用滑輪導向,其肘部關節和腕關節則采用鋼絲繩直接驅動。當在手術操作過程中,外負載作用于工具末端的執行器上時,外負載對肩部關節的力臂較長,較小負載即會產生較大負載力矩;而肩部關節滑輪的半徑(即驅動力臂)較小,驅動繩很大張緊力也只能產生較小力矩,因此該設計下手術工具負載能力較低。另一方面,受限于手術工具臂體的內部空間,其肘關節和腕關節無法布置導向滑輪,致使鋼絲繩受到的摩擦較大,運動磨損也較顯著。
電機內置型驅動,采用內置于多關節手術臂的小型伺服電機驅動,通過齒輪取代鋼絲繩的傳動,提高機械臂的負載能力。意大利Ekymed SpA公司的SPRINT系統、美國Virtual Incision公司的MIRA系統(前身為美國內布拉斯加-林肯大學的SISR系統)、香港NISI公司的NSRS系統等主要采用這樣的設計。該設計采用電機直徑通常需要超過10mm,以保證足夠的負載,加上必要的減速傳動機構,往往造成手術執行臂粗大;而由于電機內置、隨機械臂進入體腔,手術臂的封裝和消毒也是額外的技術挑戰。
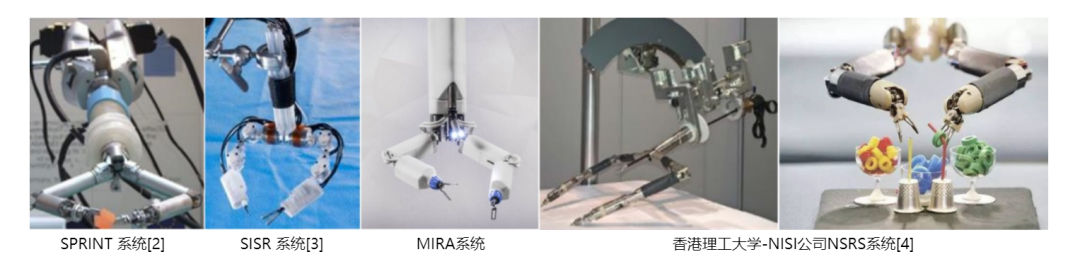
空間連桿型驅動,采用剛性連桿機構構成手術臂,其力學性能較好。但空間連桿機構的設計(包括傳動和避免干涉等)具有較大的挑戰,較難實現大范圍全維運動能力,導致手術臂運動靈活性不足。此外,手術臂結構復雜、加工成本高,受銷接關節尺寸等限制,難以小型化。因此,該技術主要在日本早稻田大學、韓國DGIST、韓國漢陽大學的單孔手術機器人研究中使用。

交叉式遠心運動機構驅動,采用被動式軟桿手術工具,配合剛性弧形中空鞘管的遠心運動,實現手術工具在病患體內的運動。為實現單孔手術,所有手術工具均須交叉通過入腹口,因此在雙側手術工具前后運動時會產生手術工具的相互干涉。此外,該構型要求體外定位臂在術中擺動,而定位臂之間布置緊湊、有碰撞風險。韓國科學技術院的Apollon系統和直觀外科用于達芬奇系統的Single-Site套件,采用此類技術。為配合剛性弧形中空鞘管,必須采用特殊的柔桿Endowrist?工具,由于該工具有著腕關節自由度不足的缺陷,因此該技術在臨床的應用非常受局限。

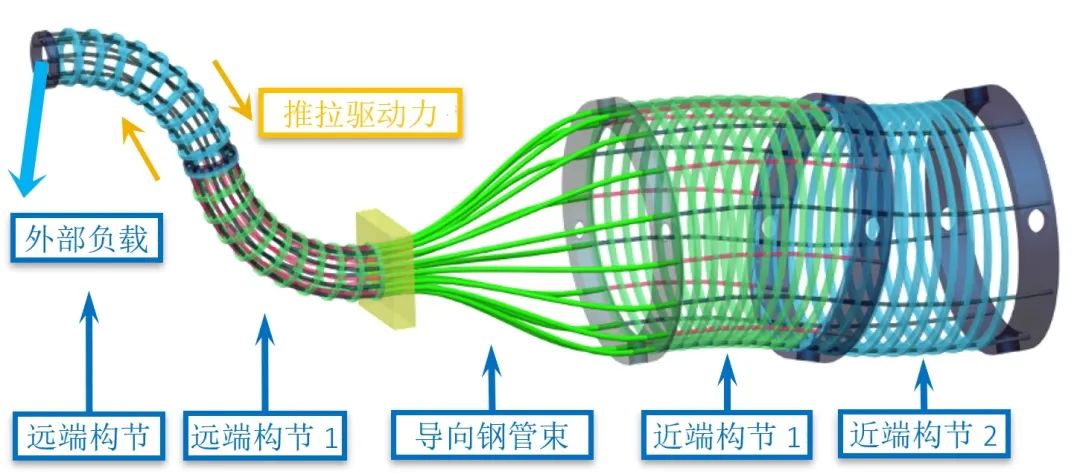
革命性的可形變對偶連續體技術,術銳的手術工具和3D電子內窺鏡的蛇形臂體均采用了原創自主的核心技術“可形變對偶連續體機構”設計。如圖所示,“可形變對偶連續體機構”由近端構節、導向鋼管束以及遠端構節組成,超彈性鎳鈦合金細桿作為結構骨從頭至尾貫穿。近端構節的彎轉,會帶來十余根結構骨的推拉運動,這些推拉運動傳遞到遠端構節,協同將遠端構節向相反的方向彎轉。采用雙構節“可形變對偶連續體機構”設計的手術工具,可將近端構節的驅動電機布置在病人體外,而病人體內的遠端構節可在十余根結構骨協同推拉下實現雙構節、八方向彎轉的靈活運動。
“可形變對偶連續體機構”具有諸多優勢:十余根結構骨可同時承受推力和拉力,手術工具蛇形臂體的負載能力顯著提高;結構骨冗余布置,其中一根斷裂,對手術工具的整體性能幾乎沒有影響,安全性極高;蛇形臂體具有連續彎曲形變特性,可輕易通過復雜形狀腔道,靈活滿足單孔手術下各種運動需要。
與傳統的多關節剛性機器人結構不同,“對偶連續體機構”力學性質復雜、形變模態多樣;為實現精準的運動控制,建模時須考慮多種非線性力學的耦合效應,還需滿足實時高效計算的運算要求,是門檻極高的系統化關鍵技術。針對“對偶連續體機構”的運動控制難點,術銳經過數年的技術探索和積淀,獨創了彈動力學復合模型,兼顧了耦合效應的補償機制和輕量解析的運算結構,使其運動控制性能達到國際領先水平。“對偶連續體機構”控制算法精準駕馭蛇形手術臂的運動控制,為醫生提供精細流暢的操作體驗。
關鍵技術的工程驗證,為驗證技術的可行性,術銳自主研發了“單多孔模塊化腔鏡手術機器人系統”工程樣機。系統由遙操作控制臺、手術執行系統和手術設備臺車三部分組成,其中手術執行系統包含多架模塊化定位臂,每架定位臂上可掛載一支手術工具或內窺鏡。通過定位臂與鞘管的靈活布置,手術執行系統可以兼容多孔和單孔兩種構型:在多孔構型下,每架定位臂與一個標準的直鞘管連接,分別經各個皮膚切口將手術工具和內窺鏡送至病患體內;在單孔構型下,所有定位臂和一個多腔道的鞘管相連,手術工具與內窺鏡通過彎曲的多通道鞘管腔道后進入病患體內并展開至工作姿態。
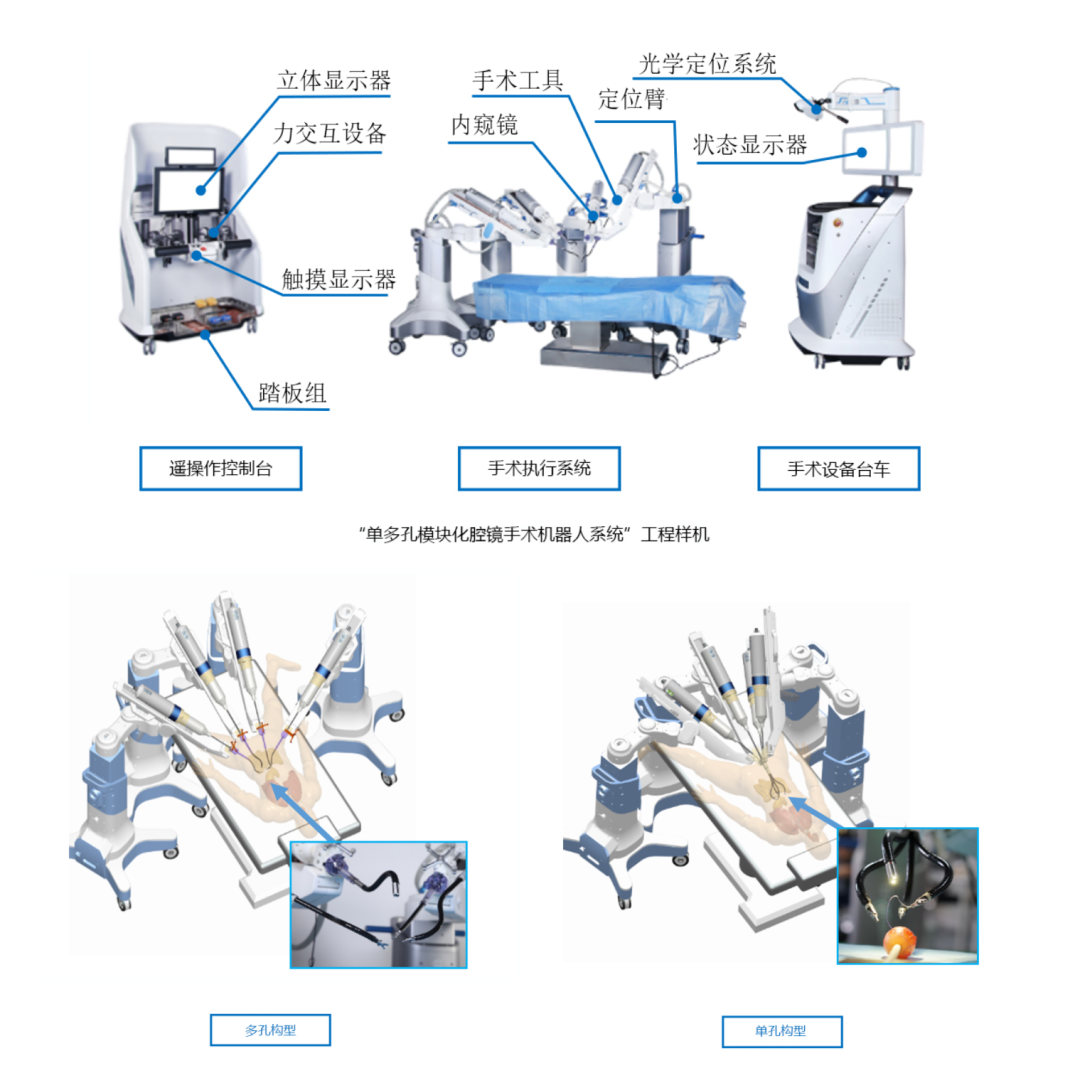
遙操作控制臺配備了立體顯示器、觸摸顯示器、踏板組和兩臺6自由度力交互輸入設備,術者通過遙操作控制臺可實現直觀的手術操作以及對手術流程和設備狀態的監控與管理。手術設備臺車配備了狀態顯示器,并可置放冷光源、氣腹機、高頻能量發生器等設備。
手術過程中,主刀醫生操縱控制臺的兩臺力位交互輸入設備,在立體三維視覺的引導下,對病患側手術執行系統內的內窺鏡和手術工具實施遙操作控制,實現組織剝離、電切、電凝、縫合等一系列腔內精準操作以及手術視野調整。
作為工程樣機,該系統集成了術銳所有關鍵技術以及手術實施的基本功能,系統指標亦達到世界前列水平:手術工具具備全維六自由度運動能力及額外的手術執行器開合控制功能;內窺鏡提供1080p高清立體視覺反饋。
該工程樣機成功完成了數十例動物實驗,涵蓋泌尿外科、婦科、普外科、胸外科多種適應癥,驗證了關鍵技術“可變形對偶連續體機構”在單孔腔鏡手術中的安全性和有效性。但與此同時,該模塊化腔鏡手術機器人樣機系統也難以避免分體式手術機器人系統設計的典型不足,即占據手術床旁面積大、對臨床流程干擾較多等。術銳在新一代手術機器人系統設計中進行了大刀闊斧的改進,用戶可根據病患手術部位實現不同的定位臂協同擺位和調整,增強了智能自動化的手術流程管理。
專li簡析
術銳機器人是一家醫療器械公司,致力于自主研發、生產和銷售創新的腔鏡手術機器人系統、配套手術工具及耗材。根據術銳機器人新聞稿介紹,該公司依托“對偶連續體機構”這一創新性設計,推出搭載鎳鈦合金蛇形手術臂的術銳單孔腔鏡手術機器人,并于2020年獲得中國國家藥監局(NMPA)批準進入創新醫療器械特別審查程序(即“綠色通道”)。
術銳單孔腔鏡手術機器人借助強力蛇形手術工具和沉浸式直觀遙(直觀遙感)操作,經典高難度單孔術式得以在主刀醫生手中實現精準操作。據介紹,術銳單孔腔鏡手術機器人具有手術切口更微創、操作更靈活、術中更穩定等優勢,可應用于泌尿外科、婦科、普外科、胸外科、心外科等多個臨床領域。術銳機器人公司創始人、上海交通大學徐凱教授表示,從開放手術到多孔腔鏡,再到單孔腔鏡乃至經自然腔道手術,患者創傷逐漸減少的同時,手術操作難度則持續升高,以機器人技術輔助手術操作提升手術的直觀感和精準度是大勢所趨。術銳機器人自創立以來,秉承“極致微創,讓微創外科解決方案更貼近患者”的使命,依托“可形變對偶連續體機構”這一核心原創關鍵技術,聯合醫療機構完成了多種創新術式,讓患者在較小創傷的同時更大程度保留器官功能。不僅如此,術銳機器人靈活精準、安全穩定的操作表現也得到了眾多專家的高度認可。術銳高度重視知識產權保護,對相關產品進行了全方位的系統化的布局,旗下術銳單孔腔鏡手術機器人擁有全鏈條關鍵核心技術和完全自主知識產權,目前已在全球范圍內提出知識產權及申請超過600項。筆者擇機選擇了兩項發明專li進行了解讀,以饗讀者。
| 公開/公告號 | CN109452976B | 申請日 | 2018-12-28 |
| 發明名稱 | 一種柔性手術工具系統 | ||
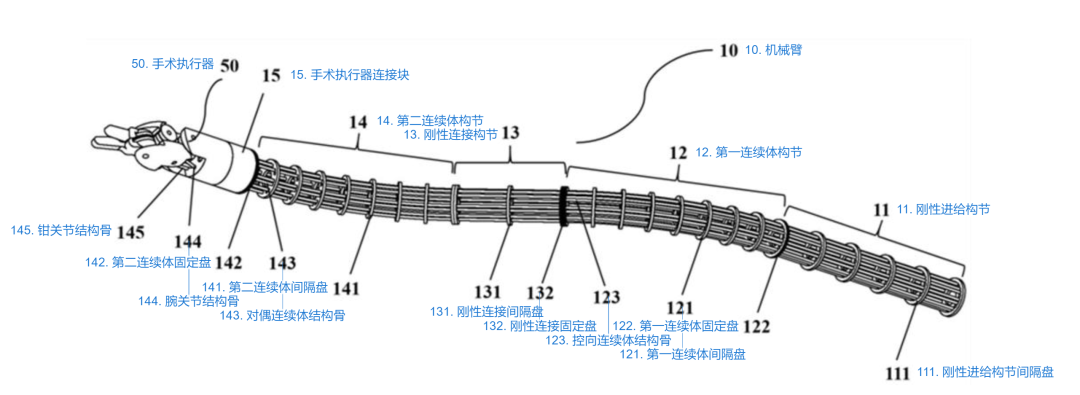
| 解決的技術問題 | 本發明由于采取以上技術方案,其具有以下優點:1、本發明采用基于對偶連續體機構的機械臂和手術執行器為主體,該對偶連續體機構包括順序關聯的第一連續體構節、剛性連接構節和第二連續體構節,并配合以傳動驅動單元,其中,傳動驅動單元與剛性連接構節關聯,同時傳動驅動單元與手術執行器關聯,因此通過傳動驅動單元可以驅動對偶連續體機構向任意方向彎轉,以及驅動手術執行器完成在第一平面內的旋轉運動和/或在第二平面內的張合運動。2、本發明對偶連續體機構中的對偶連續體結構骨兩端固結在第一連續體構節近端和第二連續體構節遠端,對偶連續體結構骨在驅動過程中長度保持不變,因此第一連續體構節、剛性連接構節和第二連續體構節的總長度保持不變,當傳動驅動單元驅動第一連續體構節向某一方向彎轉,第二連續體構節的耦合運動也被唯一確定。3、本發明在對偶連續體機構的末端設置手術執行器,手術執行器控線一端與腕關節旋轉體和/或鉗關節旋轉體連接,另一端通過轉向滑輪與傳動驅動單元連接,由此可以實現對手術執行器的腕關節旋轉體和/或鉗關節旋轉體的控制。4、本發明的傳動驅動單元采用雙頭螺桿、滑塊作為直線運動機構,當驅動雙頭螺桿旋轉時,與該雙頭螺桿配合的兩滑塊以相同的速度進行反向直線運動,從而帶動與滑塊連接的控向連續體結構骨、腕關節結構骨或鉗關節結構骨受推或受拉,從而實現對偶連續體機構向任意方向發生彎轉,以及手術執行器的腕關節旋轉體和/或鉗關節旋轉體繞關節軸旋轉。 | ||
| 技術方案 | 本發明涉及一種柔性手術工具系統,包括:機械臂,機械臂包括第一連續體構節、剛性連接構節和第二連續體構節,第一連續體構節、剛性連接構節和第二連續體構節順序關聯以形成對偶連續體機構;手術執行器,連接在第二連續體構節的遠端;傳動驅動單元,分別與剛性連接構節和手術執行器關聯,用于驅動第一連續體構節向任意方向彎轉,進而耦合驅動第二連續體構節完成向相反的方向彎轉,以及用于驅動手術執行器完成在第一平面內的旋轉運動和/或在第二平面內的張合運動。本發明提供的柔性手術工具系統能夠較好地應用于經人體自然腔道或經單一手術切口并且實施手術。 | ||
| 相關附圖 |
| ||
| 公開/公告號 | CN110037795B | 申請日 | 2018-12-28 |
| 發明名稱 | 一種雙彎曲型柔性手術工具系統 | ||
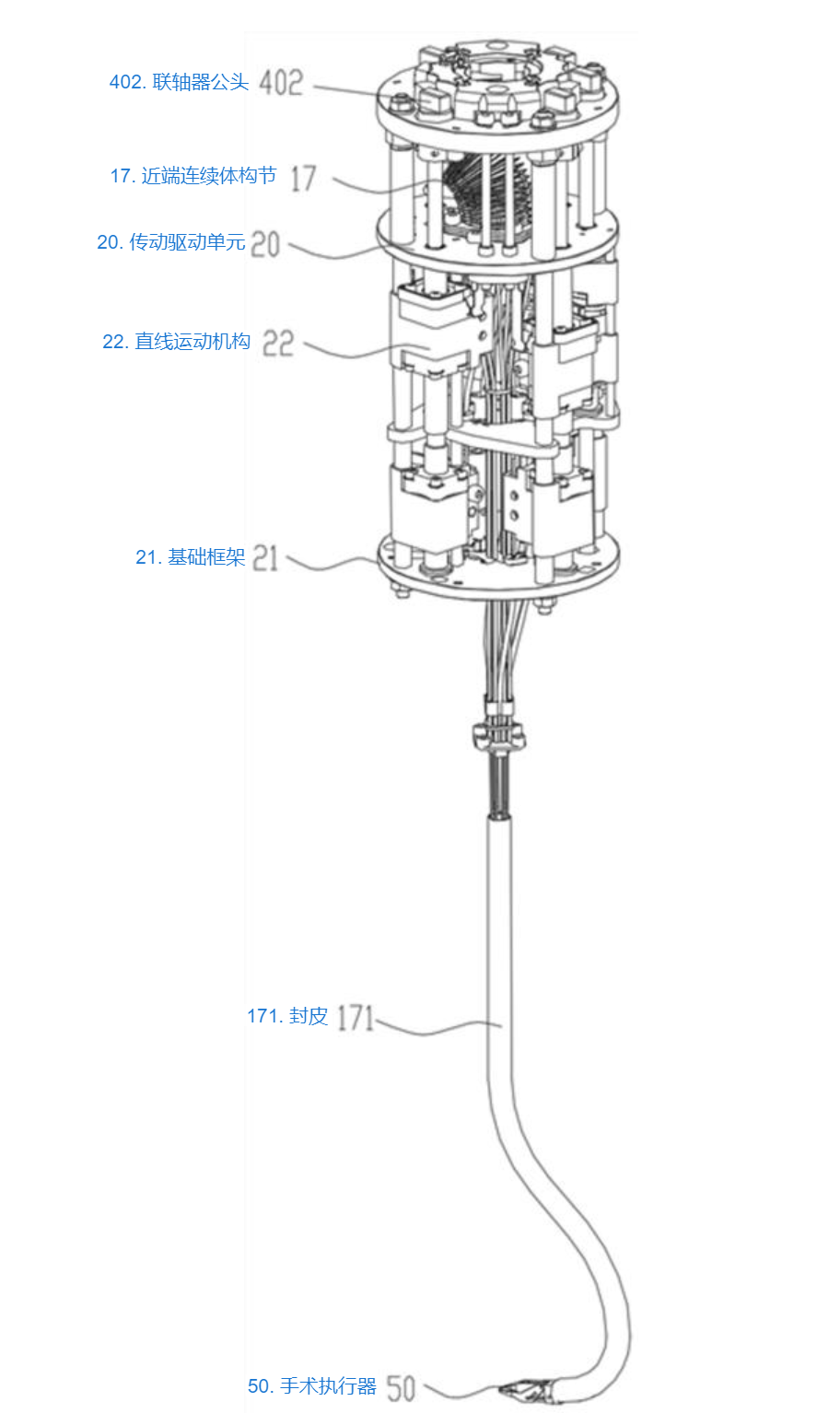
| 解決的技術問題 | 本發明由于采取以上技術方案,其具有以下優點:1、本發明設置由第一連續體構節、剛性連接構節和第二連續體構節順序關聯的第一對偶連續體機構,同時在第一對偶連續體機構的遠端設置第三連續體構節,第三連續體構節的結構骨通過第一對偶連續體機構與近端連續體構節連接以形成第二對偶連續體機構,并配合以傳動驅動單元,傳動驅動單元分別與剛性連接構節和近端連續體構節關聯,或者第三連續體構節的結構骨直接與傳動驅動單元關聯,因此通過傳動驅動單元可以驅動第一對偶連續體機構和第二對偶連續體機構/第三連續體構節向任意方向彎轉。由此,第一對偶連續體機構和第二對偶連續體機構/第三連續體構節形成雙彎曲型機械臂,增加了手術工具運動靈活性,擴展了手術工具的運動空間,能夠使得在體外機械臂保持固定位置的狀態下,提供手術工具在體內的足夠大的覆蓋范圍并達到手術動作的精確控制,從而使手術工具的運動性能更加優越,并且有助于提高手術器械的運動性能,實現手術器械的小型化、量輕化。2、本發明的第一對偶連續體機構中的結構骨兩端分別固結在第一連續體構節近端和第二連續體構節遠端,該結構骨在驅動過程中長度保持不變,因此第一連續體構節、剛性連接構節和第二連續體構節的總長度保持不變,當傳動驅動單元驅動第一連續體構節向某一方向彎轉,第二連續體構節的耦合運動也被唯一確定。同樣的,第二對偶連續體機構的結構骨/第三連續體構節的結構骨在驅動過程中長度也保持不變,當傳動驅動單元驅動近端連續體構節向某一個方向彎曲,第三連續體構節的耦合運動也被唯一確定。3、本發明的傳動驅動單元采用雙頭螺桿、滑塊作為直線運動機構,當驅動雙頭螺桿旋轉時,與該雙頭螺桿配合的兩滑塊以相同的速度進行反向直線運動,從而帶動與滑塊連接的控向連續體結構骨或近端連續體結構骨受推或受拉,從而實現第一或第二對偶連續體機構/第三連續體構節向任意方向發生彎轉。 | ||
| 技術方案 | 本發明涉及一種雙彎曲型柔性手術工具系統,包括:機械臂,機械臂包括第一連續體構節、剛性連接構節、第二連續體構節和第三連續體構節,第一連續體構節和第二連續體構節關聯以形成第一對偶連續體機構;近端連續體構節,布置在第一連續體構節近端,并與布置在第二連續體構節遠端的第三連續體構節關聯以形成第二對偶連續體機構;傳動驅動單元,分別與剛性連接構節和近端連續體構節關聯,用于驅動第一連續體構節向任意方向彎轉,進而耦合驅動第二連續體構節向相反的方向彎轉,以及驅動近端連續體構節向任意方向彎轉,進而耦合驅動第三連續體構節向相反的方向彎轉。本發明能夠較好地應用于經人體自然腔道或經單一手術切口并且實施手術。 | ||
| 相關附圖 |
| ||
結語
誠如領域內人士共同認識的那樣,手術機器人逐漸贏得市場追捧,站上了智能精細化發展、醫保政策利好的快車道,全球以及國內各大手術機器人廠商也必會將達芬奇等先進機器人作為重要的標桿和對照,聯動產學研醫生多方力量,不斷創新,推動中國手術機器人行業更智能化、精準化、微創化的發展,相關知識產權問題也必將會成為各大手術機器人廠商的研究重點課題,后續相關產品的的研發和專li事務值得持續關注。
(文章來源于互聯網)


